Vehicle System Dynamics and Control
Identification of Repetitive Task Systems
This research focuses on the identification of systems that are asked to execute the same task repetitively. One example of these systems is manufacturing processes. The repetitive nature of such systems allows us to adopt a notion similar to Iterative Learning Control. More specifically, the information obtained in one trial can be passed to a subsequent trial to improve the parameter learning. This identification method is shown to be valuable for both Linear Time Varying systems and Linear Time Invariant systems.
For Linear Time Varying systems whose parameters have discontinuous changes, classical adaptive estimation has the limitation of slower transient than desirable. For many manufacturing systems, the task set for the control system repeats itself from part to part. This will allow us to adopt Iterative Learning Identification method and achieve convergence in the iteration domain instead of the time domain, which will in turn improve the transient identification result. One example of the applications is a pick and place robot shown in the video below.
For Linear Time Invariant systems which are asked to repeat their trajectories, Iterative Learning Identification can be adopted to achieve smaller parameter variance. This identification method has been verified using a John Deere 7700 tractor. The lateral dynamics model of the tractor is obtained using Iterative Learning Identification method, and a feedback controller is designed based on the identified model. This feedback controller is verified in a hardware-in-the-loop test, and the tractor tracking results with lane changes are shown in the video below.
Selected Publications
1. N. Liu and A. Alleyne, “Iterative Learning Identification Applied to an Automated Off-highway Vehicle” Accepted for publication in IEEE Transactions on Control Systems Technology, 2013
2. N. Liu and A. Alleyne, “Time-varying Norm Optimal Iterative Learning Identification”, Proceedings of the 2013 American Control Conference, Washington, D.C., 2013 (Best Presentation in Session Award)
2. N. Liu and A. Alleyne, “Norm Optimal Iterative Learning Identification for Linear Time Varying Systems”, Proceedings of ASME Dynamic Systems and Control Conference, 2012
3. N. Liu and A. Alleyne, “Iterative Learning Identification for an Automated Off-highway Vehicle”, Proceedings of the 2011 American Control Conference, San Francisco, CA, June29-July1, 2011 (Best Presentation in Session Award)
Vehicle-Environment Interactions
Research Introduction
Vehicle – environment interactions usually occur for mechanical vehicle systems with some apparatus attached for a specific purpose. Figure 1 illustrates several examples of vehicles that interact with an environment. The vehicle functions as a carrier, and the apparatus is controlled by actuators to interact with the environment for the purpose of precisely accomplishing a certain task. Whilst the vehicle is manipulating the particular apparatus, the dynamics of the vehicle are influenced by the environment as it is proceeding over some ground or water surface.
The vehicle – environment interaction during the working process in these systems can largely influence working efficiency by introducing an unknown reference (the terrain profile) or disturbances (the terrain profile exciting the vehicle dynamics) to the systems. Some environmental conditions can be pre-measured, such as the terrain shape ahead of a mining vehicle via LIDAR; some others may be hard to access, such as the waves or currents under a crane ship. Another potential challenge for precisely controlled operation is that the vehicle systems themselves, in many cases, are under-actuated and non-collocated systems, which becomes a potential challenge for effective feedback control. In addition, due to the heavy load nature of most tasks, the actuator system, mostly hydraulic system, cause considerable delay in the system response which induces additional bandwidth limitation for feedback control [1][2].

Figure 1: Systems with vehicle – environment interaction
Methodology:
Targeting the fundamental limitation of the mechanical system, the proposed methodology is shown in Figure 2.
Aiming at solving the fundamental limitation by plant dynamics(underacuation and non-collocation), integrated design and control is introduced. Parameter redesign is used to improve the mechanical properties of the system. A feedback controller can then be designed based on the improved open loop mechanical system, and the combined pairing should result in better closed loop performance. This process can be iterated until the closed loop performance satisfies the design requirement or no further improvement can be made [3].
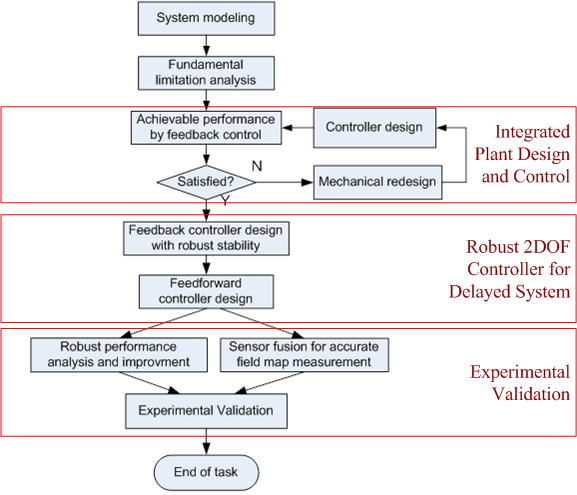
Figure 2: Structure of the proposed research
To solve the actuator delay problem, a feedforward controlleris added to the existing feedback loop to form a two degree of freedom (DOF) controller. Therefore, the task is to design an optimal two DOF robust controller than can be generally used for delayed system as shown in [4][5]. The structure of the control system is shown in Figure 3. The feedback controller C(s) is designed to optimize the feedback loop performance including robustness and feedback response. The feedforward filters Q1(s) and Q2(s) are optimized to find the best balance between the trade-off of delay compensation and extra error by system uncertainties.

Figure 3: structure of the two DOF controller
Journal Publications
- Y. Xie and A. Alleyne, “Two Degrees of Freedom Control for Combine Harvester Header Height Control”, Journal of Dynamic Systems, Measurement, and Control, accepted, 2013.
- Y. Xie and A. Alleyne, “A Robust Two Degree-Of-Freedom Controller for Systems with Both Model and Measurement Uncertainty”, Control Engineering Practice, accepted, 2013.
- Y. Xie, A. Alleyne, A. Greer and D. Deneault, “Fundamental Limits in Combine Harvester Header Height Control System”, Journal of Dynamic Systems, Measurement, and Control, 135(3), Mar., 2013.
- Y. Xie and Q. Liu, “Research on Locating Algorithm of Vision Alignment System in Automatic high Precision Chip Mounter(高精度自动贴片机视觉系统定位算法研究”, Optical Technique (光学技术), Mar. 2008.
Conference Publications
- Y. Xie and A. Alleyne, “Integrated Design and Control for Header Height Control of Combine Harvesters”, invited paper for 2014 American Control Conference, Submitted.
- Y. Xie and A. Alleyne, “Robust Model Inversion Based two DOF Control for MIMO System with Both Model and Signal Uncertainties”, 2014 World Congress of the International Federation of Automatic Control, Submitted.
- Y. Xie and A. Alleyne, “A Robust Two DOF Controller for Delayed Systems”, Proceedings of the 2013 American Control Conference, Washington, DC, Jun., 2013.
- Y. Xie and A. Alleyne, “Two Degree of Freedom Controller on Combine Harvester Header Height Control”, Proceedings of the 2012 ASME Dynamic Systems and Control Conference, Fort Lauderdale, FL, Oct. 2012 (Best Paper in Session Award ).
- H. Shi and Y. Xie, “Feedback Shape Control for Deployable Mesh Reflector”, Proceedings of the 2012 ASME Dynamic Systems and Control Conference, Fort Lauderdale, FL, Oct. 2012.
- Y. Xie and A. Alleyne, “Integrated Plant and Controller Design of a Combine Harvester System”, Proceedings of the 2011 ASME Dynamic Systems and Control Conference, Arlington, Nov. 2011.
- Y. Xie, A. Alleyne, A. Greer and D. Deneault, “Fundamental Limits in Combine Harvester Header Height Control System”, Proceedings of the 2011 American Control Conference, San Francisco, Jun., 2011 (Best Presentation in Session).
- Y. Xie, A. Alleyne, A. Greer and D. Deneault, “Header Height Control of a Combine Harvester System”, Proceedings of the 2010 ASME Dynamic Systems and Control Conference, Boston, MA, Sep, 2010.