
-
-
- Ph.D. Mechanical Engineering – University of Illinois; 2021 (Expected)
- M.S. Mechanical Engineering – University of Illinois; 2018
- B.S. Mathematical Sciences – University of California, Santa Barbara; 2014
- Research Areas: Iterative Learning Control, Linear Control Systems, Precision Motion, Additive Manufacturing
-
Current Work
Iterative learning control (ILC) is a control strategy utilized when target applications are repetitive in nature – manufacturing and tooling practices are prime examples. Precision motion control of manufacturing systems is a target application of this research.
Previous Work
Pulsed power and fast switch technologies require magnetic passive devices ie. inductors and/or ferromagnets to meet electromagnetic energy storage needs. These passives can occupy up to 50% of a power supply’s mass and volume at the chip, making them the largest, single component, contributor in most cases. Furthermore, the hysteresis losses due to magnetic elements within power storage can lead to overheating and eventual failure of power supplies.
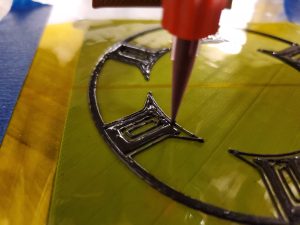
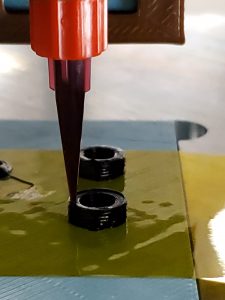
Work in my thesis aimed at addressing these issues by demonstrating a method of manufacturing the ferrite cores of an inductor at low temperatures by additively manufacturing an epoxy composite. This provided the framework for a similar process that uses Superparamagnetic composites to eliminate the hysteresis losses while reducing the size of the overall inductors required; leading to increases in power density for pulsed power electronics.
Publication List
- S.S. Igram, A.G. Alleyne, “A Series-Hierarchical Iterative Learning Controller for Multi-Stage Systems,” IEEE Control Systems Letters, 2021. (Link)
- S.S. Igram, “Low-Temperature Manufacturing of Ferrite-Epoxy Inductor Cores by Micro-Robotic Deposition,” M.S. Thesis, Dept. Mech. Eng., Univ. Illinois Urbana-Champaign, Urbana, IL., October 2018. (Link)