- angatkin@illinois.edu
- PhD Candidate in Mechanical Engineering – University of Illinois at Urbana-Champaign
- M.S. – National Research Tomsk Polytechnic University, 2011
- B.S. – National Research Tomsk Polytechnic University, 2009
- Research Interests: Soft robotics, Control and Autonomous navigation
Current work
My research focuses on design and autonomous navigation framework for the soft origami-enabled mobile robot named OSCAR. The abbreviation OSCAR stands for Origami-enabled Soft Crawling Autonomous Robot. In this research, the robot design and modeling, as well as, path following, and path planning are considered.
The OSCAR is a robot bio-inspired by the caterpillar crawling locomotion. It can locomote in the 2D plane, by using the two origami towers driven by the servomotors. With the servomotor’s rotation applied, the origami towers can expand and contract, allowing the robot body to expand or contract. The locomotion is enabled by together the origami towers and the anisotropic friction feet. Here, ‘anisotropic’ means that friction is not constant in different directions, i.e., feet exhibit low friction for the robot’s forward direction, and high friction for the backward direction.
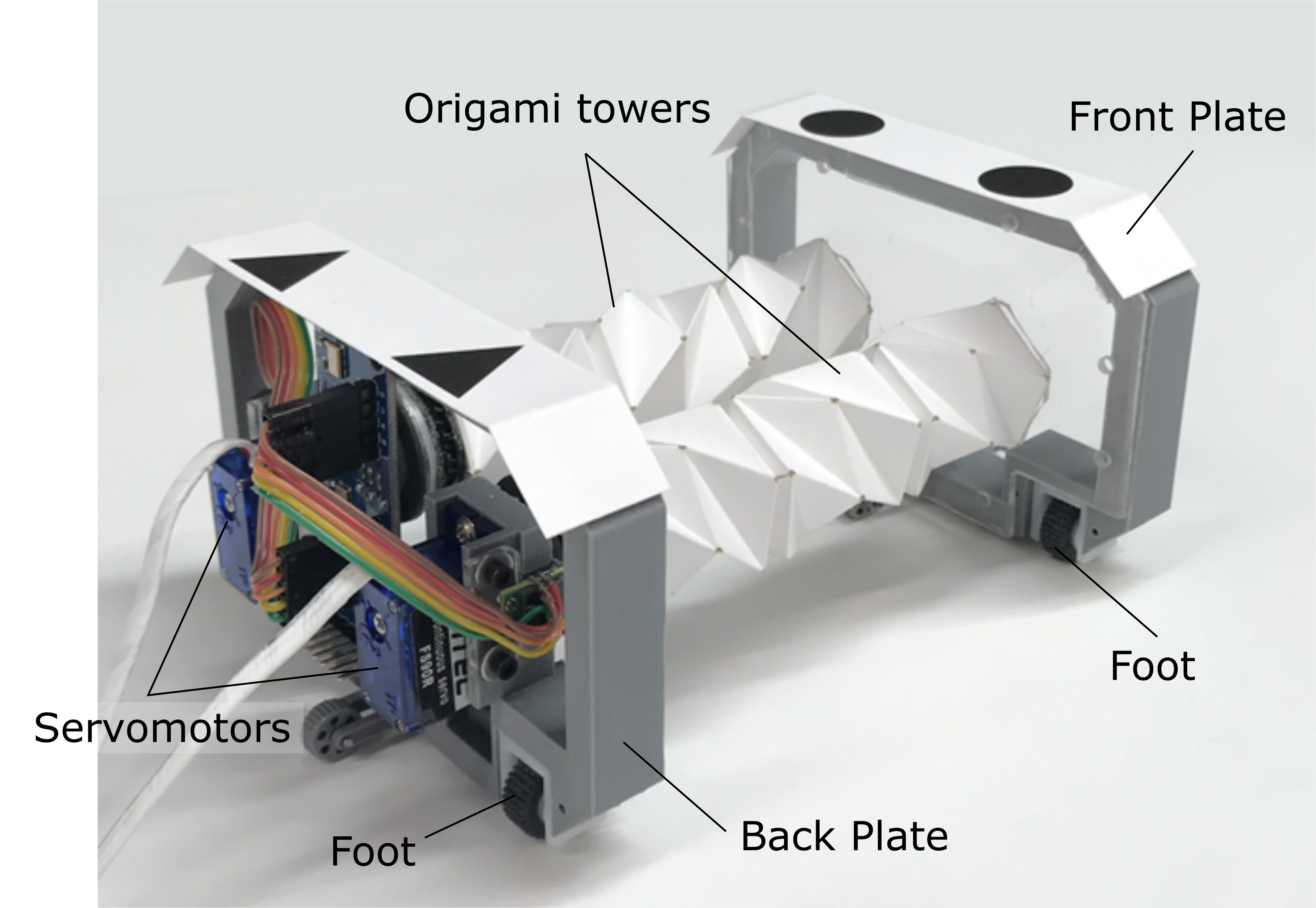
Figure 1. Soft origami-enabled crawling robot OSCAR.
Besides the robot compliance has multiple advantages, it also makes the robot to be severely underactuated and hard to control. Therefore, I work in parallel on both designing control and improving the robot design to decrease uncertainties in the robot locomotion.
Relevant publications (Journal)
- K. J. Gustafson, O. Angatkina, and A. Wissa, “Model-based design of a multistable origami-enabled crawling robot,” Smart Mater. Struct., 2019
Relevant publications (Conference)
- O. Angatkina, B. Chien, A. Pagano, T. Yan, A. Alleyne, S. Tawfick, A. Wissa, “A metameric crawling robot enabled by origami and smart materials,” Proc. ASME Smart Materials, Adaptive Structures and Intelligent Systems, 2017.
- O. Angatkina, A. Alleyne, “Model predictive control of a pumped two-phase cooling system with microchannel heat exchangers”, Proc. ASME Dyn. Syst. Control Conf., 2019.
- O. Angatkina, K. Gustafson, A. Wissa, and A. G. Alleyne, “Path following for the soft origami crawling robot,” Proc. ASME Dyn. Syst. Control Conf., 2019.