Please note: Herschel Pangborn has graduated from the ARG. Please visit sites.psu.edu/pangborn for the latest information on his research.

- Curriculum Vitae
- Personal Website

- Twitter: @HCPangborn
- pangbor2@illinois.edu
- Ph.D. Mechanical Engineering – University of Illinois (May 2019)
- M.S. Mechanical Engineering – University of Illinois (August 2015)
- B.S. Mechanical Engineering – Pennsylvania State University (May 2013)
Research Summary:
Optimizing the performance, efficiency, and safety of energy systems is a critical research area. Improvements in energy management are needed for both stationary systems (e.g. air conditioning and refrigeration) and vehicle systems (e.g. high performance aircraft and automobiles). My research spans a number of challenges associated with the control of energy systems. For vehicle systems, I work to develop modeling and control frameworks that capture and coordinate multi-domain and multi-timescale interactions. Ongoing work includes the development of model-based hierarchical controllers that leverage knowledge of system interconnections to robustly optimize system-wide performance and efficiency. For air conditioning and refrigeration systems, I work to better understand and control the complex dynamics of multi-phase heat exchangers. These systems can be captured in modeling by treating them as a collection of distinct operating modes, each with its own model formulation. Controllers for these systems can also benefit from a switched framework, allowing for the development of model-based control laws for each mode.
Research Interests:
- Hierarchical and Distributed Control
- Model Predictive Control
- Control of Switched Systems
- Dynamic Modeling and Control of Energy Systems
- Design and Control of Thermal Management Systems for Aircraft and Automotive Applications
- Vapor Compression Refrigeration System Modeling and Control
This research is supported by:
- The National Science Foundation Graduate Research Fellowship
- The National Science Foundation Engineering Research Center for Power Optimization of Electro-Thermal Systems (POETS)
- The Center for Integrated Thermal Management of Aerospace Vehicles (CITMAV)
- The Air Force Research Laboratory (AFRL)
Introduction to Controls:
Presented to the Center for Power Optimization of Electro-Thermal Systems (POETS) on March 16, 2017
Current Work:
Modern vehicles are complex systems composed of many subsystems and components that interact in a variety of energy domains and on a variety of dynamic timescales. To meet the challenges imposed by increasing power and thermal demands on these systems, it is necessary to develop comprehensive strategies that manage the routing and storage of energy system-wide. My goal is to optimize the performance, efficiency, and safety of these systems subject to increased operational requirements, supporting the successful development and deployment of the next generation of vehicle systems. Theoretical contributions provide analysis methods to ensure the stability and feasibility of model-based distributed and hierarchical control, while experimental demonstration exemplifies the applicability of these approaches as enabling technology for continued vehicle electrification.
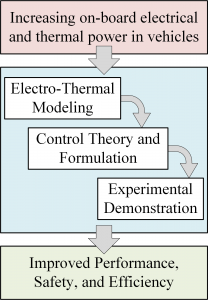
Fig. 1 Enabling electrification through modeling and control
Hierarchical Model Predictive Control of Aircraft Electro-Thermal Systems
Hierarchical control represents an enabling technology for the electro-thermal coordination of vehicle energy systems by employing a network of communicating controllers to coordinate behavior across multiple timescales, systems, and physical domains [1,3,14]. As shown in the example hierarchical control framework of Fig. 2, controllers in the upper control layers coordinate high-level behavior at a relatively slow update rate and communicate references down the hierarchy to be tracked by faster-updating controllers responsible for managing specific subsystems and actuators. While only three control levels are shown in the example framework of Fig. 2, more levels can be added as necessary to match the timescales present in the system.
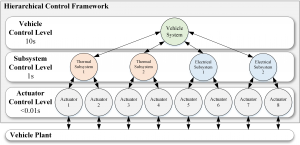
Fig. 2 Example three-level hierarchical control framework
When advance knowledge of the vehicle task and/or anticipated environmental conditions is available, proactive action can be taken to optimize operation, for example by pre-cooling thermal storage elements in advance of large heat loads, or by strategically shedding or rescheduling the operation of non-critical electrical systems when thermal limits are predicted to be exceeded.
The left plot of Fig. 3 shows a comparison of graph-based hierarchical Model Predictive Control (MPC), centralized MPC, and decentralized proportional-integral (PI) control as applied to an experimental testbed representative of an aircraft fuel thermal management system (FTMS), subject to heat loads from electrical equipment. The hierarchical controller performs significantly better in maintaining desired bounds on cold plate temperatures due to its ability to coordinate both slow and fast dynamics, including compensating for unknown disturbances and model error.
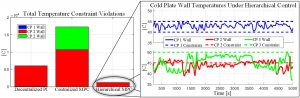
Fig. 3 Comparison of control approaches for an FTMS subject to heat loads from electrical equipment
Ongoing work includes hardware-in-the-loop implementation of electro-thermal hierarchical control, in which the plant consists of a real-time simulated air bay and electrical system coupled to a physical fluid-thermal testbed, as shown in Fig. 4. In this demonstration, hierarchical control has been shown to enable aircraft electrical systems to supply 1.5x more power to on-board equipment as compared to traditional control approaches, while simultaneously consuming the same power from the generator and reducing temperature limit violations by 5x.
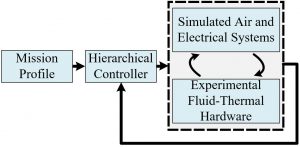
Fig. 4 Hardware-in-the-loop implementation of electro-thermal hierarchical control
Hierarchical Model Predictive Control of Automotive Electric Vehicles
This research develop a hierarchical control framework to manage the electro-thermal dynamics of an automotive electric vehicle (EV) powertrain. As shown in Fig. 5, the upper levels of the hierarchical control framework provide long-term planning and coordination, while the lower levels leverage their faster update rate to compensate for model and disturbance error, improving the tracking performance and constraint satisfaction. The performance of the hierarchical control framework is validated through a case study in which the controller manages trade-offs among competing electrical and thermal goals, including between tracking objectives and thermal constraint enforcement [12]. The results of the case study indicate that the energy management controller coordinates the powertrain components to achieve high tracking performance while avoiding significant violation of constraints.
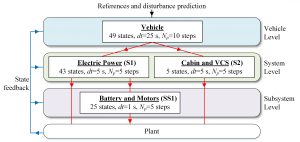
Fig. 5 Candidate Hierarchical Control Framework for an Automotive Electric Vehicle
Architecture Optimization for Thermal Management Systems
As new thermal management system applications and requirements emerge, engineers must learn how best to meet new needs, sometimes without the benefit of design heritage or the associated expert knowledge for particular systems. Cooling system architecture design problems can have a vast design space that is cognitively difficult to navigate, motivating efficient systematic design methods with the flexibility to explore and assess new configurations. This research develops a design framework supporting comprehensive exploration of the class of single phase fluid-based cooling architectures shown in Fig. 6. The candidate cooling system architectures are represented using labeled rooted tree graphs. Dynamic models are automatically generated from these trees using a graph-based thermal modeling framework. Optimal performance is determined by solving an appropriate fluid flow control problem, handling temperature constraints in the presence of exogenous heat loads to maximize thermal endurance. Case studies are performed in simulation, with components having variable sets of heat loads and temperature constraints. Results include optimization of thermal endurance for an enumerated set of 4,051 architectures [2,13].
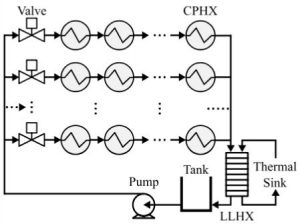
Fig. 6 Class of Architectures Under Study, with Cold Plate Heat Exchangers (CPHXs) in Series and Parallel and a Single Split/Junction
Stability of Decentralized Control Under Switching
In addition to the practical application of hierarchical control discussed above, current research includes the development of methods for ensuring the stability of decentralized and hierarchical controllers, including under the switching on and off of paths for energy transport within a system (i.e., edges of its graph-based model) as actuators and components switch among modes of operation [11]. This has been achieved by analyzing the passivity of systems modeled as graphs, where a common storage function can be applied to ensure that passivity is preserved under coupling between switched subsystems and in feedback connection with controllers, as shown in Fig. 7. The structure of the graph-based models allows a set of inputs and outputs to be determined that render each subsystem passive while admitting a nonlinear control-affine model representation that is applicable to a wide class of systems. MPC-based control formulations for each subsystem can then be augmented with decentralized passivity-based constraints to guarantee closed-loop stability under switching.
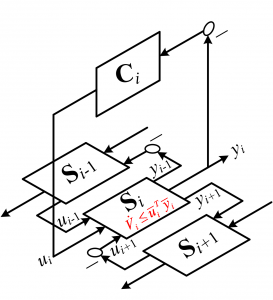
Fig. 7 Negative Feedback Connection Between a Subsystem Si, its Controller Ci, and Adjacent Subsystems
Graph-Based Dynamic Modeling of Energy Systems
To facilitate model-based hierarchical control, a dynamic graph-based modeling approach has been derived by applying the conservation of energy and mass to physical components and systems [4,14]. Coupling between system elements is succinctly embedded in the structure of interconnections of a graph, allowing awareness of this coupling to be exploited for hierarchical model-based control [1,3,13] and leveraged in formal analysis of stability and robustness under closed-loop control [9,11].
Fig. 8 below shows a notional example of an oriented graph, which consists of an interconnection of vertices (circles) and edges (lines). When modeling a system as a graph, capacitive elements that store energy, or mass, are represented as vertices. Paths for the transport of energy, or mass, between storage elements are represented as edges. Conservation equations are then applied to develop dynamic models of the vertex states. Graph-based models of components can be derived individually and then assembled to form complete system models. This modularity facilitates representation of a wide range of vehicle energy system scales and configurations.
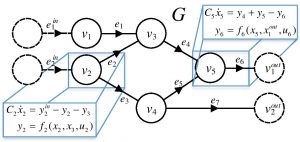
Fig. 8 Notional Graph Example
The graph-based modeling framework has been validated with experimental data collected from a testbed constructed by members of the Alleyne Research Group. This testbed, pictured in Fig. 9, has been designed as a “thermal fluid breadboard” to facilitate the rapid reconfiguration of components, allowing many different system architectures to be represented.

Fig. 9 Experimental Testbed Used for Model Validation
Comparisons of experimental data to both nonlinear and linearized graph-based models have demonstrated the ability of the proposed modeling framework to accurately describe both the hydrodynamic and thermodynamic behavior of thermal fluid systems. Several traces from such comparisons are shown in Fig. 10.
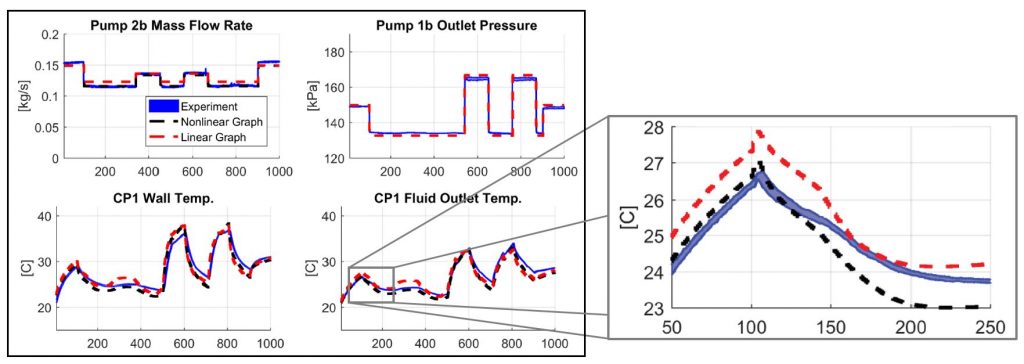
Fig. 10 Validation of Graph-Based Models with Experimental Data for Both Hydrodynamics and Thermodynamics.
Previous Work
Model Predictive Control of Aircraft Fuel Thermal Management Systems
In collaboration with the Center for Integrated Thermal Management of Aerospace Vehicles (CITMAV) at Purdue University, this research seeks to meet the challenges of managing thermal energy and enforcing operational constraints for high-performance aircraft. To achieve these goals, a Model Predictive Controller (MPC) is implemented that utilizes preview of upcoming loads and disturbances to prevent temperature constraint violations. Case studies on an experimental testbed demonstrate improved performance of these proactive control approaches as compared to traditional reactive control designs [5,16].
Fig. 11 below shows the CITMAV experimental testbed, designed to be a simplified version of an aircraft fuel thermal management system (FTMS). Fig. 12 shows a schematic of the testbed. The system consists of two heat loads (high and low frequency) cooled by heat exchange with a chilled loop.
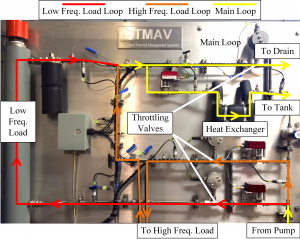
Fig. 11 CITMAV Experimental Testbed
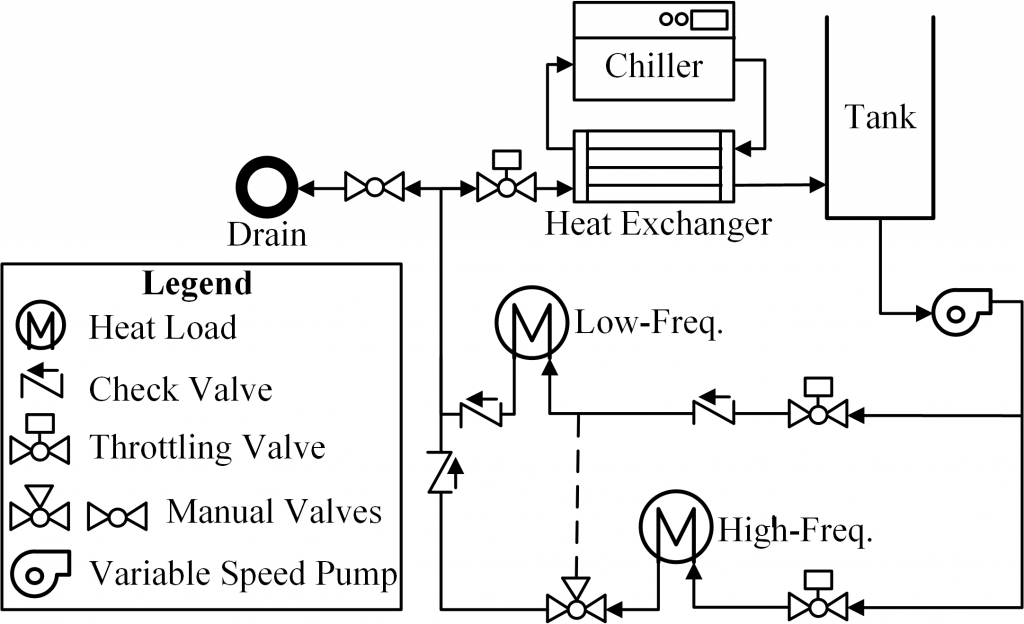
Fig. 12 CITMAV Testbed Schematic
The system is modeled as an oriented graph, as shown in Fig. 13, where vertices of the graph represent dynamic temperature states of the system and edges of the graph represent power flow between the vertices, capturing heat transfer via fluid flow and energy exchange with heat loads and thermal sinks. This graph-based model is then used to design an MPC for thermal management.
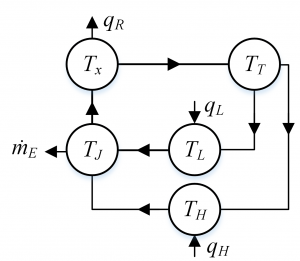
Fig. 13 Graph-Based Model
Fig. 14 compares the performance of the MPC (the “proactive” controller) against that of a PI controller (the “reactive” controller). In these results, the MPC receives a 30 second preview window of the upcoming low frequency heat load, representing an operational profile that may be known in advance as part of an aircraft’s mission. The proactive controller increases the mass flow rate 30 seconds prior to the onset of the first step in heat load. This is a result of the preview information received by the controller about the upcoming load, and has the effect of pre-cooling the low frequency heat load bay to prepare for the upcoming heat load, preventing a significant violation of the constraint later on. By contrast, the reactive approach does not increase the mass flow rate until after the temperature exceeds the reference, by which time it is too late to prevent significant overheating.
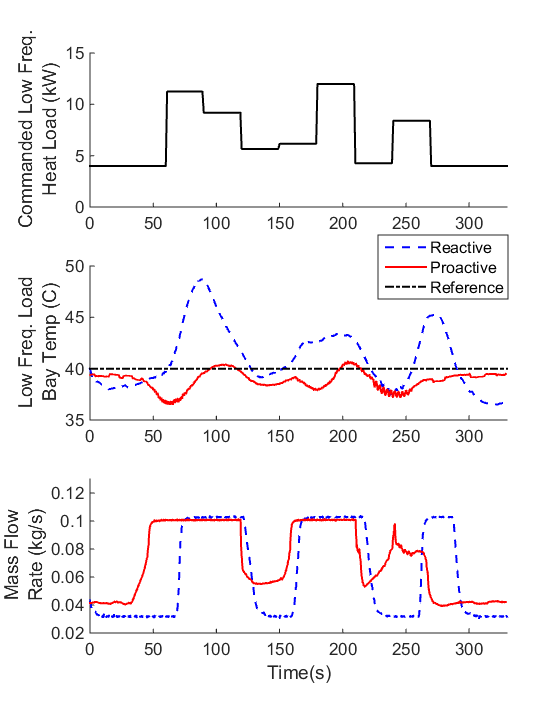
Fig. 14 Experimental Application of Reactive and Proactive Control Approaches
Switched Control of Vapor Compression Systems
The dynamics of energy systems can very greatly with operating conditions. These systems can be captured in modeling by treating them as a collection of distinct operating modes, each with its own model formulation. Switching the model between these modes as a function of states and inputs allows the system to be described across a wide operational envelope. For example, the switched moving boundary modeling approach for multi-phase evaporators incorporates modes both with and without superheated flow at the refrigerant outlet as shown in Fig. 15.
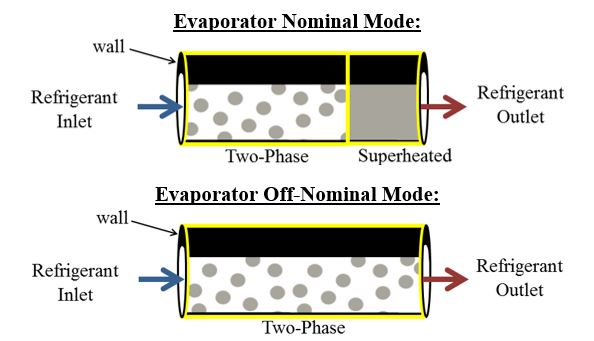
Fig. 15 Switched Moving Boundary Evaporator Modes
Controllers for these systems can also benefit from a switched framework as shown in Fig. 16, allowing for the development of model-based control laws for each mode.
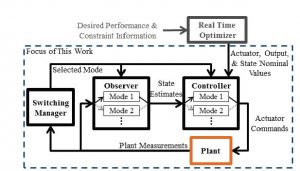
Fig. 16 Switched Control Architecture
This research proposes a switched Linear Quadratic Gaussian (LQG) design to rapidly drive the system operation between modes and to perform regulation once the desired mode of operation has been achieved [6,17]. Stability analysis of the closed-loop switched system is presented, and application of the control approach in both simulation and on an experimental VCS testbed demonstrate the success of the control design.
Heat Exchanger Modeling with Humidity
The effects of air humidity on the performance of refrigerant-to-air heat exchangers in vapor compression systems (VCSs) are non-negligible in modeling and control design for some applications. Such applications include both those in which the ambient humidity is expected to vary greatly over time and those in which control of the air outlet humidity is desired. In this research, a control-oriented heat exchanger model is developed that captures the effects of changing inlet humidity and predicts the outlet humidity and condensate mass flow rate [18]. As shown in Fig. 17, experimental validation demonstrates that the inclusion of humidity modeling improves the accuracy of the heat exchanger model during periods of relatively rapid condensate formation (the last 2500 seconds of Fig. 17), allowing the model to capture the most salient dynamics while maintaining computational and analytical simplicity.
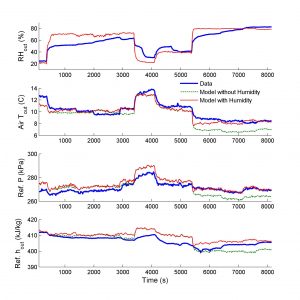
Fig. 17 Evaporator Humidity Model Validation
As shown in Fig. 18, which uses a different set of experimental data than in Fig. 17, the humidity models also accurately predict the mass of liquid condensate formed on the external surfaces of the heat exchanger.
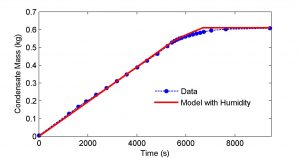
Fig. 18 Evaporator Condensate Validation
Comparison of Heat Exchanger Modeling Approaches
Multi-phase heat exchangers for vapor compression systems (VCSs) are known as the most complex VCS components to model due to the highly nonlinear nature of the thermal dynamics that take place and the timescale separation between dynamics of different domains. This work compares the two most prevalent approaches used for first principles control-oriented modeling of heat exchangers, known as the finite volume (FV) and switched moving boundary (SMB) methods [7]. The goal of this work is to provide insight to members of both academia and industry into the tradeoffs associated with the choice of approach for heat exchanger modeling.
The FV approach involves discretizing the heat exchanger spatially into an arbitrary number of equally sized CVs (control volumes), as shown in Fig. 19. In the SMB approach, the heat exchanger is divided into CVs corresponding to each refrigerant phase, as shown in Fig. 20. Unlike with the FV approach, the size of volumes can vary with time as phase flow lengths change.
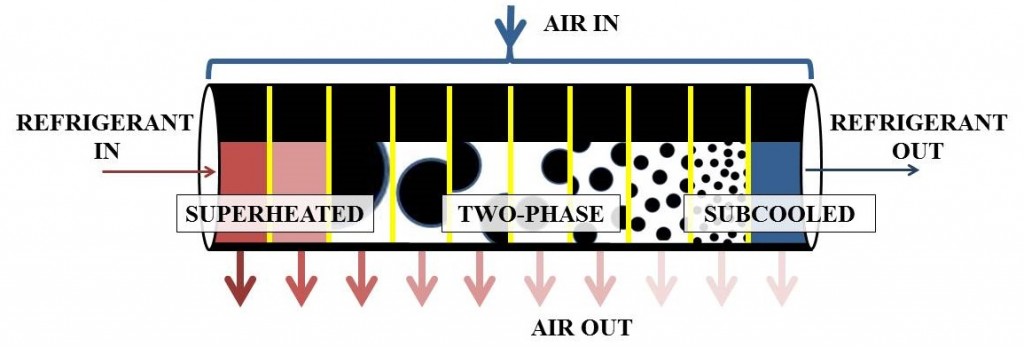
Fig. 19 Finite Volume Modeling Approach
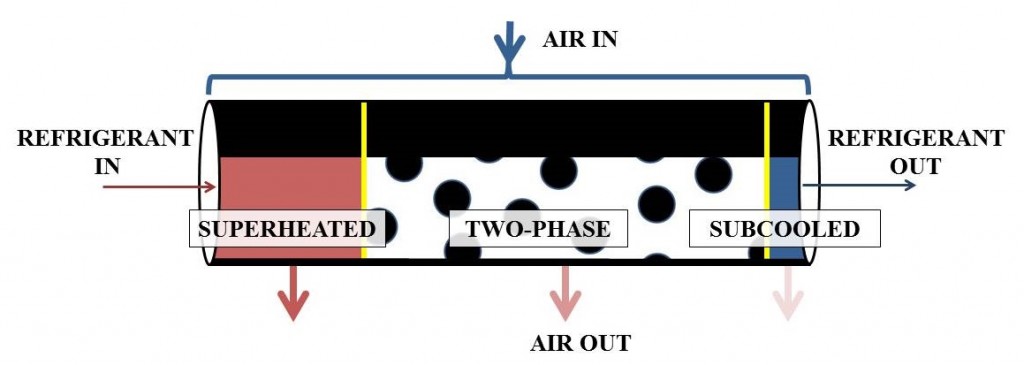
Fig. 20 Moving Boundary Modeling Approach
Fig. 21 shows simulation outputs for VCS models using both SMB and FV heat exchanger components. For the FV models, results from several different quantities of CVs are provided. These plots are superimposed over an envelope composed of the maximum and minimum values of experimental data from among five identical trials.
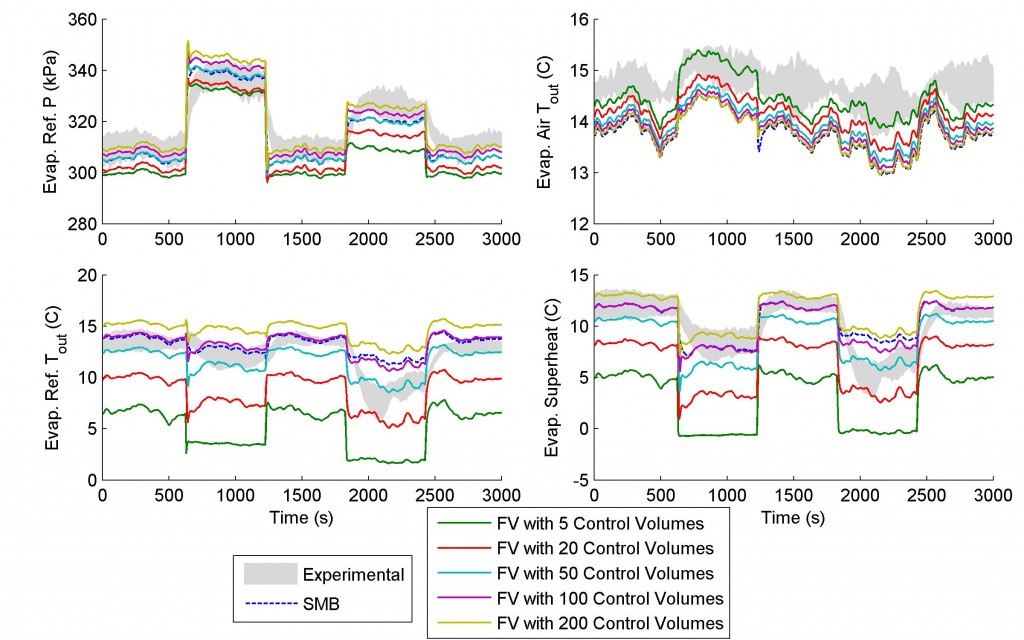
Fig. 21 Nonlinear Model Outputs and Max/Min Bounds of Experimental Data from Five Trials
Fig. 22 shows the real time factor of each model, defined as the length of time taken to run the simulation divided by the length of time that is simulated. As can be seen, the SMB model has a significantly smaller RTF, and therefore less computational complexity, than any of the FV models.
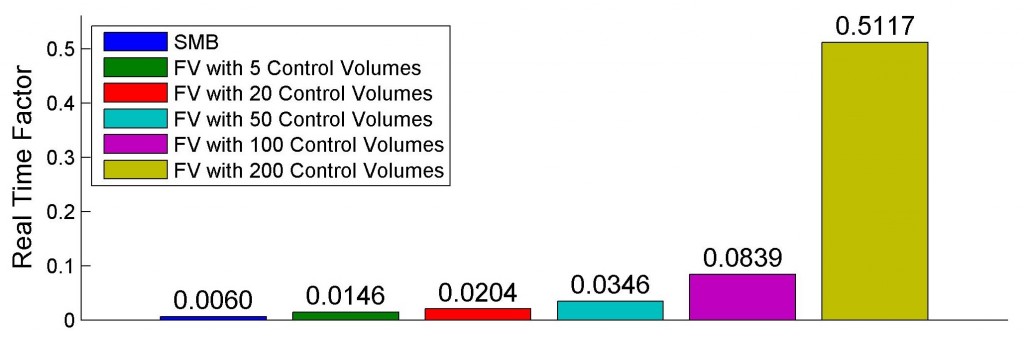
Fig. 22 Real Time Factor of Simulations
After close evaluation, a nuanced view of dynamic VCS simulation emerges from this work. If simulation speed is paramount, a SMB model can perform as accurately as a highly discretized FV model while executing significantly faster. Therefore, accuracy alone is not the sole forte of the highly discretized FV model. Instead, the intended use in target application, and the need for flexibility of implementation may be the driving factors for selection of the FV model, since the added complexity of variable CV lengths in the SMB model render it more difficult to extend to various heat exchanger types and geometries than the FV model.
Publications
Journal
[1] Koeln, J.P., Pangborn, H.C., Kawamura, M., Williams, M.A., and Alleyne, A.G., “Hierarchical Control of Aircraft Electro-Thermal Systems,” IEEE Transactions on Control Systems Technology, 2019. (accepted)
[2] Peddada, S.R.T., Herber, D.R., Pangborn, H.C., Alleyne A.G., and Allison J.T., “Optimal Flow Control and Single Split Architecture Exploration for Fluid-Based Thermal Management,” Journal of Mechanical Design, 2019. [PDF] [GIT]
[3] Pangborn, H.C., Koeln, J.P., Williams, M.A., and Alleyne, A.G., “Experimental Validation of Graph-Based Hierarchical Control for Thermal Management,” ASME Journal of Dynamic Systems, Measurement, and Control, 2018. [PDF]
[4] Williams, M.A., Koeln, J.P., Pangborn, H.C., and Alleyne, A.G., “Dynamical Graph Models of Aircraft Electrical, Thermal, and Turbomachinery Components,” ASME Journal of Dynamic Systems, Measurement, and Control, 2018. [PDF]
[5] Pangborn, H.C., Hey, J.E., Deppen, T.O., Alleyne, A.G., and Fisher, T.S., “Hardware-in-the-Loop Validation of Advanced Fuel Thermal Management Control,” Journal of Thermophysics and Heat Transfer, 2017. [PDF]
[6] Pangborn, H.C. and Alleyne, A.G., “Switched Linear Control for Refrigerant Superheat Recovery in Vapor Compression Systems,” Control Engineering Practice, Volume 57, December 2016, Pages 142-156. [PDF]
[7] Pangborn, H.C., Alleyne, A.G., and Wu, N., “A Comparison between Finite Volume and Switched Moving Boundary Approaches for Dynamic Vapor Compression System Modeling,” International Journal of Refrigeration, Volume 53, May 2015, Pages 101-114. [PDF]
Conference
[8] Pangborn, H.C., Laird, C.E., and Alleyne, A.G., “Hierarchical Hybrid MPC for Management of Distributed Phase Change Thermal Energy Storage Under Pulsed Loading,” Proc. of the 2020 American Control Conference, July 2020. (submitted)
[9] Pangborn, H.C. and Alleyne, A.G., “Cooperativity and Hierarchical MPC of State-Constrained Switched Power Flow Systems,” Proc. of the 2019 American Control Conference, July 2019. [PDF]
[10] Tannous, P.J., Docimo, D.J., Pangborn, H.C., and Alleyne, A.G., “Hierarchical Estimation for Complex Multi-Domain Dynamical Systems,” Proc. of the 2019 American Control Conference, July 2019. [PDF]
[12] Pangborn, H.C., Koeln, J.P. and Alleyne, A.G., “Passivity and Decentralized MPC of Switched Graph-Based Power Flow Systems,” Proc. of the 2018 American Control Conference, June 2018. [PDF] [Presentation]
[12] Docimo, D.J., Pangborn, H.C., and Alleyne, A.G., “Hierarchical Control for Electro-Thermal Power Management of an Electric Vehicle Powertrain,” Proc. of the ASME 2018 Dynamic Systems and Control Conference, 2018. [PDF]
[13] Peddada, S.R.T., Herber, D.R., Pangborn, H.C., Alleyne A.G., and Allison J.T., “Optimal Flow Control and Single Split Architecture Exploration for Fluid-Based Thermal Management,” Proc. of the 2018 ASME International Design Engineering Technical Conferences, August 2018. [PDF]
[14] Pangborn, H.C., Williams, M.A., Koeln, J.P. and Alleyne, A.G., “Graph-Based Hierarchical Control of Thermal Fluid Power Flow Systems,” Proc. of the 2017 American Control Conference, May 2017. [PDF]
[15] Koeln, J.P., Williams, M.A., Pangborn, H.C., and Alleyne, A.G., “Experimental Validation of Graph-Based Modeling for Thermal Fluid Power Flow Systems,” Proc. of the ASME 2016 Dynamic Systems and Control Conference, October 2016. [PDF]
[16] Pangborn, H.C., Hey, J.E., Deppen, T.O., Alleyne, A.G., and Fisher, T.S., “Hardware-in-the-Loop Validation of Advanced Fuel Thermal Management Control,” Proc. of the 46th AIAA Thermophysics Conference, June 2016. [PDF]
[17] Pangborn, H. and Alleyne, A.G., “Switched Linear Control of Vapor Compression Systems Under Highly Transient Conditions,” Proc. of the 2016 American Control Conference, July 2016. [PDF]
[18] Pangborn, H. and Alleyne, A.G., “Dynamic Modeling of Heat Exchangers with Humidity and Condensation,” Proc. of the ASME 2015 Dynamic Systems and Control Conference, October 2015. [PDF]
[19] Pangborn, H., Brennan, S., and Reichard, K., “Development and Applications of a Robot Tracking System for NIST Test Methods,” Systems and Information Engineering Design Symposium, Charlottesville, VA, April 26, 2013. [PDF]
Theses
[20] Pangborn, H.C., “Hierarchical Control for Multi-Domain Coordination of Vehicle Energy Systems with Switched Dynamics,” Ph.D. Dissertation, Department of Mechanical Science and Engineering, University of Illinois at Urbana-Champaign, 2019. [PDF]
[21] Pangborn, H., “Dynamic Modeling, Validation, and Control for Vapor Compression Systems,” M.S. Thesis, Department of Mechanical Science and Engineering, University of Illinois at Urbana-Champaign, July 2015. [PDF]
[22] Pangborn, H., “Development and Applications of a Robot Tracking System for NIST Test Methods,” Undergraduate Honors Thesis, Department of Mechanical and Nuclear Engineering, Penn State University, May 2013. [PDF]